Los motores son los actuadores por excelencia en el área de la electromecánica. Por esto planteamos dos circuitos para ser implementados muy fácilmente, vale la pena anotar que los circuitos deben ser adaptados a el proyecto en particular.
Inversión de giro:
Para lograr la inversión de giro se puede hacer utilizando un sistema controlado desde algún sistema computacional. Dos bits, uno para avance y otro para retroceso, usando transistores NPN (2N2222) PNP (2N3406):

Puente H con transistores
Control motor DC con relé
Como podemos ver, este sistema mantiene girando el motor (M) todo el tiempo y el pulsador (P) , se usa para cambiar el giro.

Inversor giro Motor DC
Para mejorar esto, podemos usar otro relé y la siguiente configuración, esto permite controlar por medio de datos 00 apagado 01 derecha y 10 izquierda.

inversion Motor DC 2 reles
Control por relé a motor AC:
El transistor NPN puede ser (2N2222 o 2N3404)
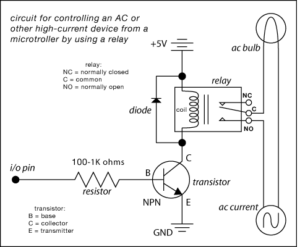
circuito De Rele

Sobre el autor